注釈
Go to the end をクリックすると完全なサンプルコードをダウンロードできます.
被写界深度のプロット#
この例では, enable_depth_of_field でプロットの一部を強調する方法を示しています.
from __future__ import annotations
import numpy as np
import pyvista as pv
from pyvista import examples
うさぎたちを大量に生成する#
glyph フィルターを使用して,たくさんのうさぎを作成します.
# download the stanford bunny and rotate it into a good position
mesh = examples.download_bunny()
mesh = mesh.rotate_x(90, inplace=False).rotate_z(90, inplace=False).scale(4, 4, 4)
# We use a uniform grid here simply to create equidistantly spaced points for
# our glyph filter
grid = pv.ImageData(dimensions=(4, 3, 3), spacing=(3, 1, 1))
bunnies = grid.glyph(geom=mesh, scale=False, orient=False)
bunnies
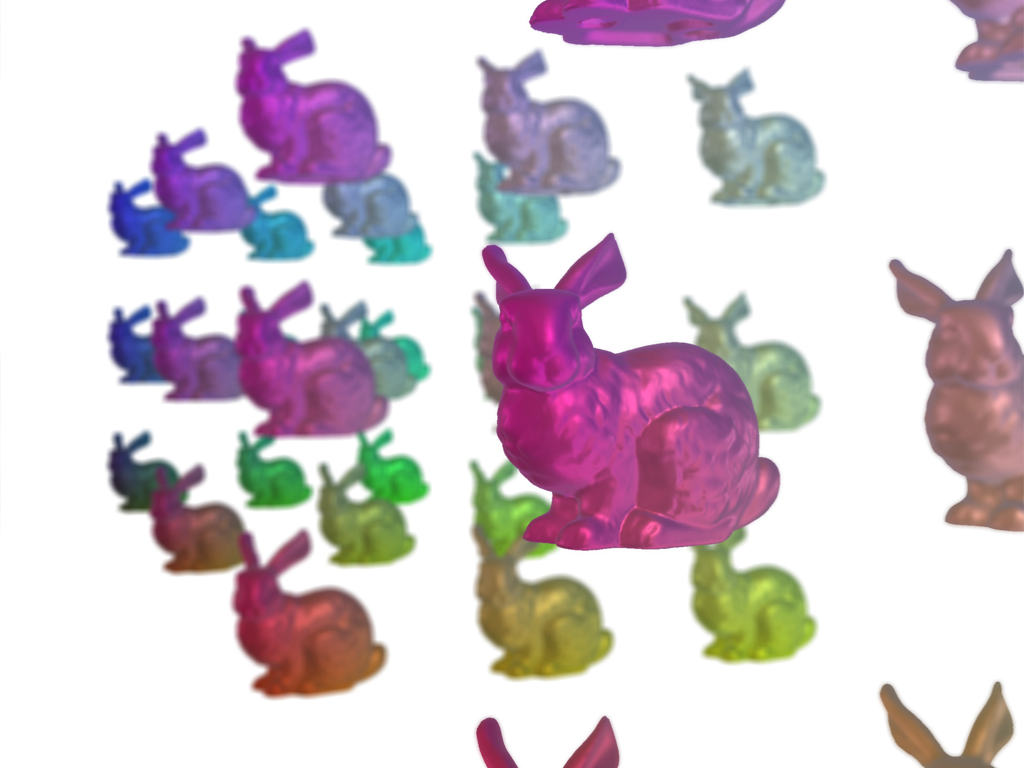
被写界深度を有効にせずにプロットを表示する#
# convert points into rgba colors
colors = bunnies.points - bunnies.bounds[::2]
colors /= colors.max(axis=0)
colors *= 255
colors = colors.astype(np.uint8)
# obtained camera position with `cpos = pl.show(return_cpos)`
cpos = [(11.6159, -1.2803, 1.5338), (4.1354, 1.4796, 1.2711), (-0.0352, -0.0004, 1.0)]
# Since we're using physically based rendering (PBR), let's also download a
# skybox cubemap use it as an environment texture. For PBR to work well you
# should have a environment texture.
cubemap = examples.download_sky_box_cube_map()
pl = pv.Plotter()
pl.background_color = 'w'
pl.add_mesh(bunnies, scalars=colors, rgb=True, pbr=True, metallic=0.85)
pl.camera_position = cpos
pl.set_environment_texture(cubemap)
pl.show()
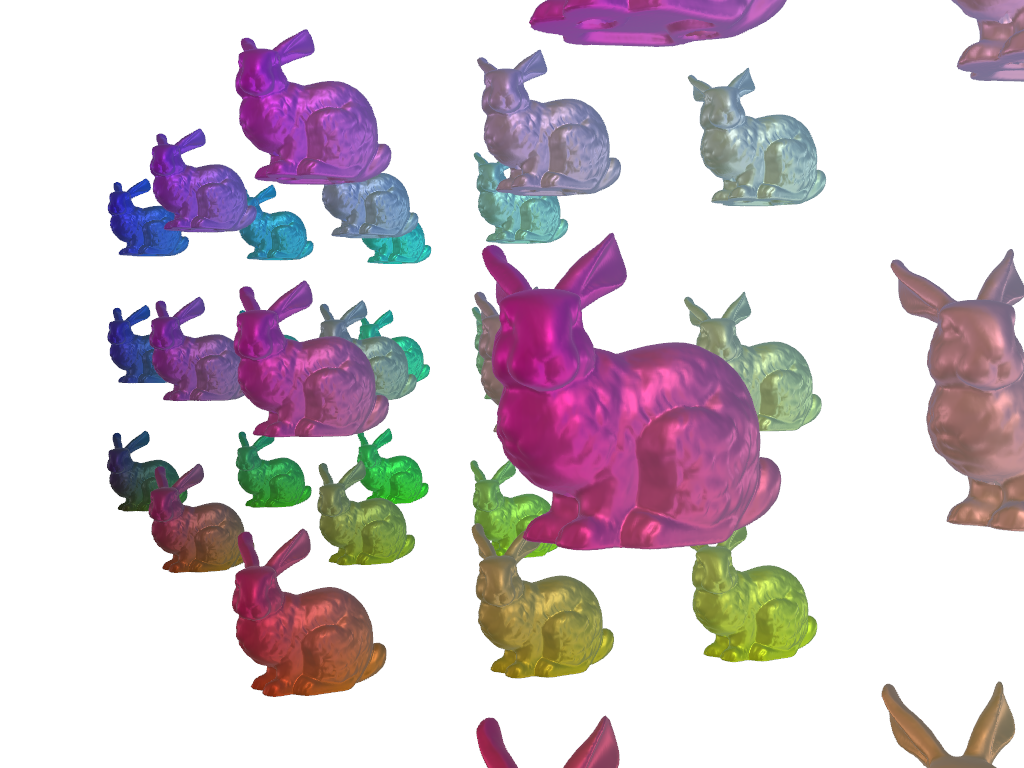
被写界深度を有効にした状態でプロットを表示する#
pl = pv.Plotter()
pl.background_color = 'w'
pl.add_mesh(bunnies, scalars=colors, rgb=True, pbr=True, metallic=0.85)
pl.camera_position = cpos
pl.enable_depth_of_field()
pl.enable_anti_aliasing('ssaa')
pl.set_environment_texture(cubemap)
pl.show()
Total running time of the script: (1 minutes 8.576 seconds)