pyvista.PolyDataFilters.collision#
- PolyDataFilters.collision(
- other_mesh,
- contact_mode=0,
- box_tolerance=0.001,
- cell_tolerance=0.0,
- n_cells_per_node=2,
- generate_scalars: bool = False,
- progress_bar: bool = False,
2つの多面体サーフェス間の衝突判定を行います.
もし
collision_modeが all contacts に設定されている場合,出力は接触そいている線になります.もしcollision_modeがファーストコンタクトやハーフコンタクトに設定されている場合は,コンタクトの出力は頂点になります.警告
現在は3角形のみが処理されます.ストリップやポリゴンをトライアングルに変換するには
PolyDataFilters.triangulate()を使用してください. それ以外の場合は,このメソッド内でメッシュの変換が行われます.- パラメータ:
- other_mesh
pyvista.DataSet 衝突をテストする他のメッシュ. 他のメッシュがサーフェスでない場合は,その外面が抽出され,3角測量されます.
- contact_mode
int, default: 0 接触モード. 以下のいずれかになります.
0 - すべての接触.2点/コリジョンで全ての接触セルペアを見つけます
1 - ファーストコンタクト.ファーストコンタクトポイントを素早く見つけます.
2 - ハーフコンタクト.接触しているすべてのセルペアを,1コリジョンにつき1ポイントで見つける.
- box_tolerance
float, default: 0.001 全体座標でのOBB(Oriented Bounding Box)ツリーの許容範囲.
- cell_tolerance
float, default: 0.0 セルの許容量(2乗値).
- n_cells_per_node
int, default: 2 各OBBのセルの数.
- generate_scalarsbool, default:
False コンタクトセルを可視化するフラグ. もし
Trueならば,接触しているセルは赤から青へと色づけされ,最初に決定された衝突は赤になります. この配列は"collision_rgba"として格納される.注釈
これにより,メッシュ内の他のセルアレイが削除されます.
- progress_barbool, default:
False 進行状況を示す進行状況バーを表示します.
- other_mesh
- 戻り値:
pyvista.PolyData"ContactCells"という名前のfield_data属性のコリジョンを含みますメッシュです. この配列は,コリジョンがある場合にのみ存在します.int衝突の数.
備考
vtk.vtkCollisionDetectionFilter の性質上,このメソッドを繰り返し使用すると
vtk.vtkCollisionDetectionFilterを直接使用した場合よりも遅くなります. このフィルタの最初の更新では, vtkOBBTree のインスタンスが2つ作成されます.その後,入力メッシュの変換や行列を変更することで,このインスタンスを更新することができます.このメソッドは変換を前提としていないので,単一の衝突テストには使いやすいですが,繰り返される衝突を高速に計算するには
pyvistaとvtkの組み合わせを使うことをお勧めします. 詳しくは, Collision Detection Example を参照してください.例
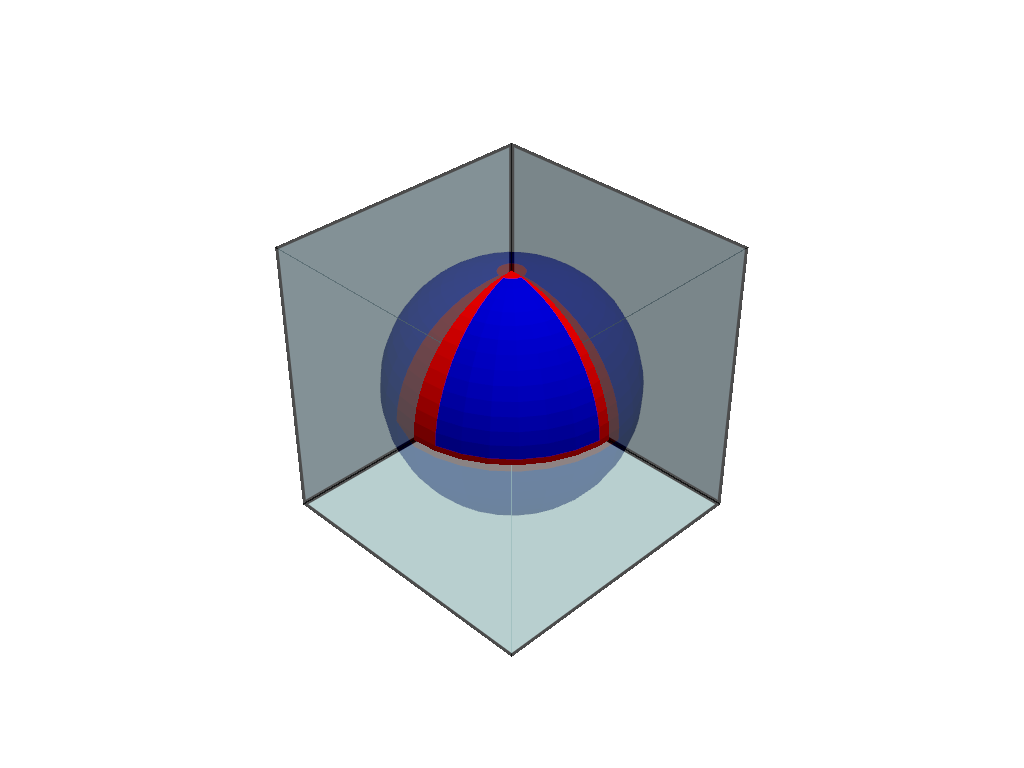
球体と立方体の背面の衝突を計算し,最初の10個の衝突のセルインデックスを出力します.
>>> import numpy as np >>> import pyvista as pv >>> mesh_a = pv.Sphere(radius=0.5) >>> mesh_b = pv.Cube((0.5, 0.5, 0.5)).extract_cells([0, 2, 4]) >>> collision, ncol = mesh_a.collision(mesh_b, cell_tolerance=1) >>> collision['ContactCells'][:10] pyvista_ndarray([464, 0, 0, 29, 29, 27, 27, 28, 28, 23])
"ContactCells"のフィールドデータを使ってコリジョンマスクを作成し,コリジョンをプロットします. 衝突のあったセルは赤で表示されます.>>> scalars = np.zeros(collision.n_cells, dtype=bool) >>> scalars[collision.field_data['ContactCells']] = True >>> pl = pv.Plotter() >>> _ = pl.add_mesh( ... collision, ... scalars=scalars, ... show_scalar_bar=False, ... cmap='bwr', ... ) >>> _ = pl.add_mesh( ... mesh_b, ... color='lightblue', ... line_width=5, ... opacity=0.7, ... show_edges=True, ... ) >>> pl.show()
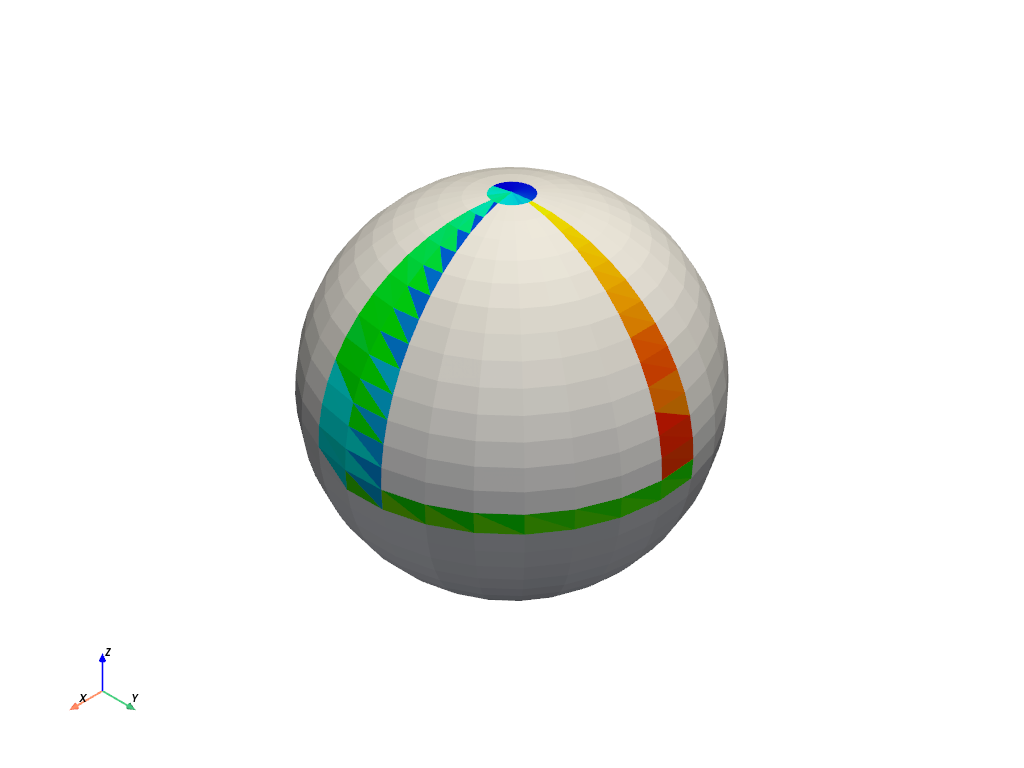
あるいは,
generate_scalarsを有効にした後,デフォルトの'collision_rgba'配列を使って衝突をプロットするだけでも構いません.>>> collision, ncol = mesh_a.collision( ... mesh_b, cell_tolerance=1, generate_scalars=True ... ) >>> collision.plot()
このフィルターを使用したその他の例については, 衝突 を参照してください.